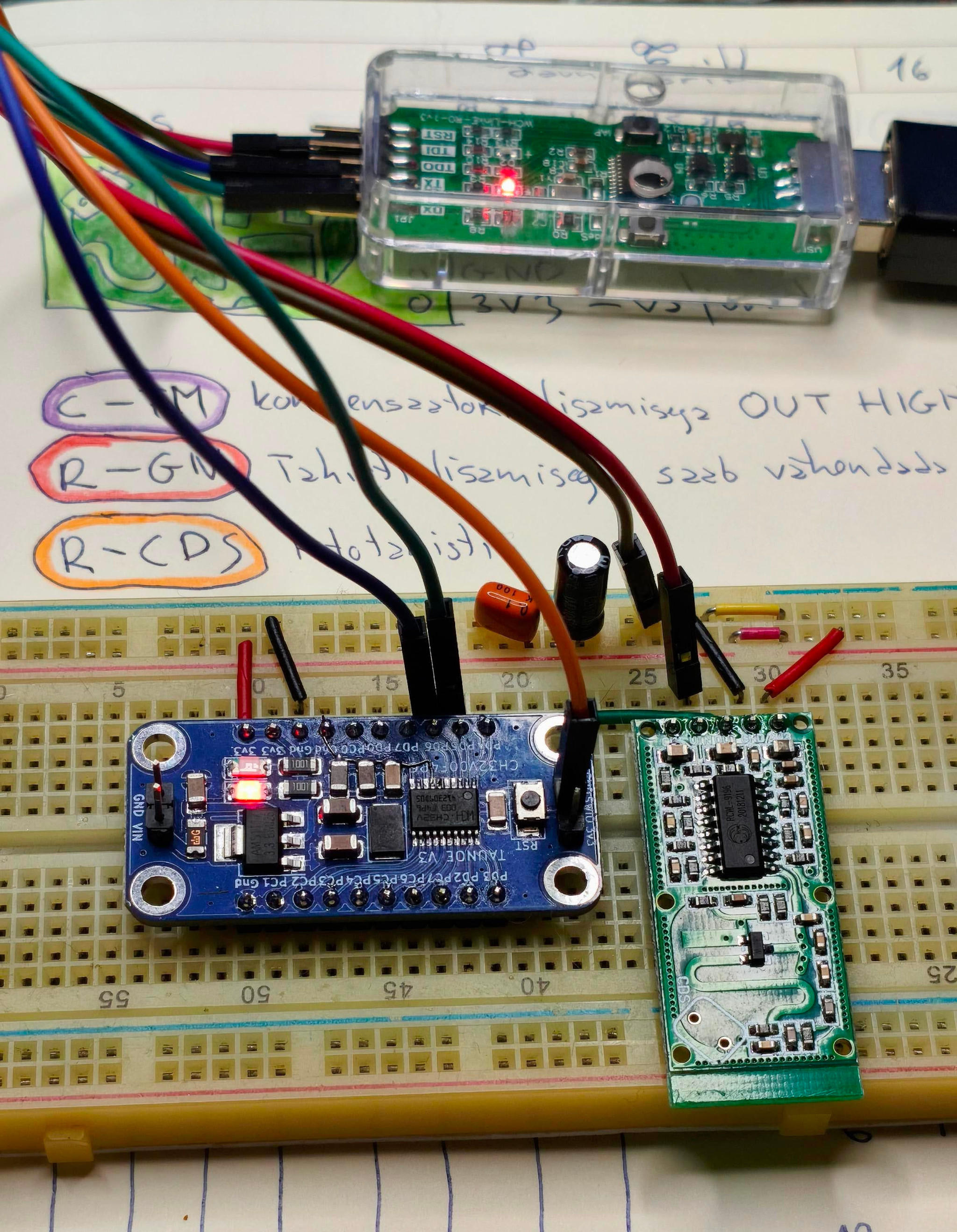
CH32V003 mikrokontroller ja RCWL-0156 radar sensor, mis on üks kõige primitiivsemaid.
Radar tuvastav liikumise. Roheline LED süttib. Jadaport prindib “+”, muul juhul “-” ja USR LED ei põle.
/*
*Hardware connection:
* PD5 -- Rx
* PD6 -- Tx
* -- LED
*
*/
#include "debug.h"
/* Global define */
#define RADAR_PORT GPIOD
#define RADAR_PIN GPIO_Pin_4
#define RADAR_RCC RCC_APB2Periph_GPIOD
#define LED_PORT GPIOC
#define LED_PIN GPIO_Pin_0
#define LED_RCC RCC_APB2Periph_GPIOC
void radar_init(void)
{
RCC_APB2PeriphClockCmd(RADAR_RCC, ENABLE);
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Pin = RADAR_PIN;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING; // RCWL drives the line, no pull needed
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(RADAR_PORT, &GPIO_InitStructure);
}
uint8_t radar_motion_detected(void)
{
return GPIO_ReadInputDataBit(RADAR_PORT, RADAR_PIN) == Bit_SET;
}
void led_init(void)
{
RCC_APB2PeriphClockCmd(LED_RCC, ENABLE);
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Pin = LED_PIN;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP; // Push-Pull output
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(LED_PORT, &GPIO_InitStructure);
}
void led_toggle(void)
{
GPIO_WriteBit(LED_PORT, LED_PIN,
GPIO_ReadOutputDataBit(LED_PORT, LED_PIN) ? Bit_RESET : Bit_SET);
}
/*********************************************************************
* @fn USARTx_CFG
*
* @brief Initializes the USART2 & USART3 peripheral.
*
* @return none
*/
void USARTx_CFG(void)
{
GPIO_InitTypeDef GPIO_InitStructure = {0};
USART_InitTypeDef USART_InitStructure = {0};
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOD | RCC_APB2Periph_USART1, ENABLE);
/* USART1 TX-->D.5 RX-->D.6 */
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_5;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_30MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_Init(GPIOD, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;
GPIO_Init(GPIOD, &GPIO_InitStructure);
USART_InitStructure.USART_BaudRate = 115200;
USART_InitStructure.USART_WordLength = USART_WordLength_8b;
USART_InitStructure.USART_StopBits = USART_StopBits_1;
USART_InitStructure.USART_Parity = USART_Parity_No;
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;
USART_InitStructure.USART_Mode = USART_Mode_Tx | USART_Mode_Rx;
USART_Init(USART1, &USART_InitStructure);
USART_Cmd(USART1, ENABLE);
}
/*********************************************************************
* @fn main
*
* @brief Main program.
*
* @return none
*/
int main(void)
{
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_1);
SystemCoreClockUpdate();
Delay_Init();
#if (SDI_PRINT == SDI_PR_OPEN)
SDI_Printf_Enable();
#else
USART_Printf_Init(115200);
#endif
//USARTx_CFG();
radar_init();
led_init();
led_toggle();
printf("SystemClk: %d\r\n", SystemCoreClock);
printf("ChipID: %08x\r\n", DBGMCU_GetCHIPID());
while(1)
{
if (radar_motion_detected())
{
GPIO_WriteBit(LED_PORT, LED_PIN, Bit_SET); // LED on
printf("+\r\n");
}
else
{
GPIO_WriteBit(LED_PORT, LED_PIN, Bit_RESET); // LED off
printf("-\r\n");
}
Delay_Ms(200); // poll every 50 ms, sensor output holds ~2s by default
}
}
Kood on GitHubis: https://github.com/taunoe/ch32v003_RCWL-0516/
