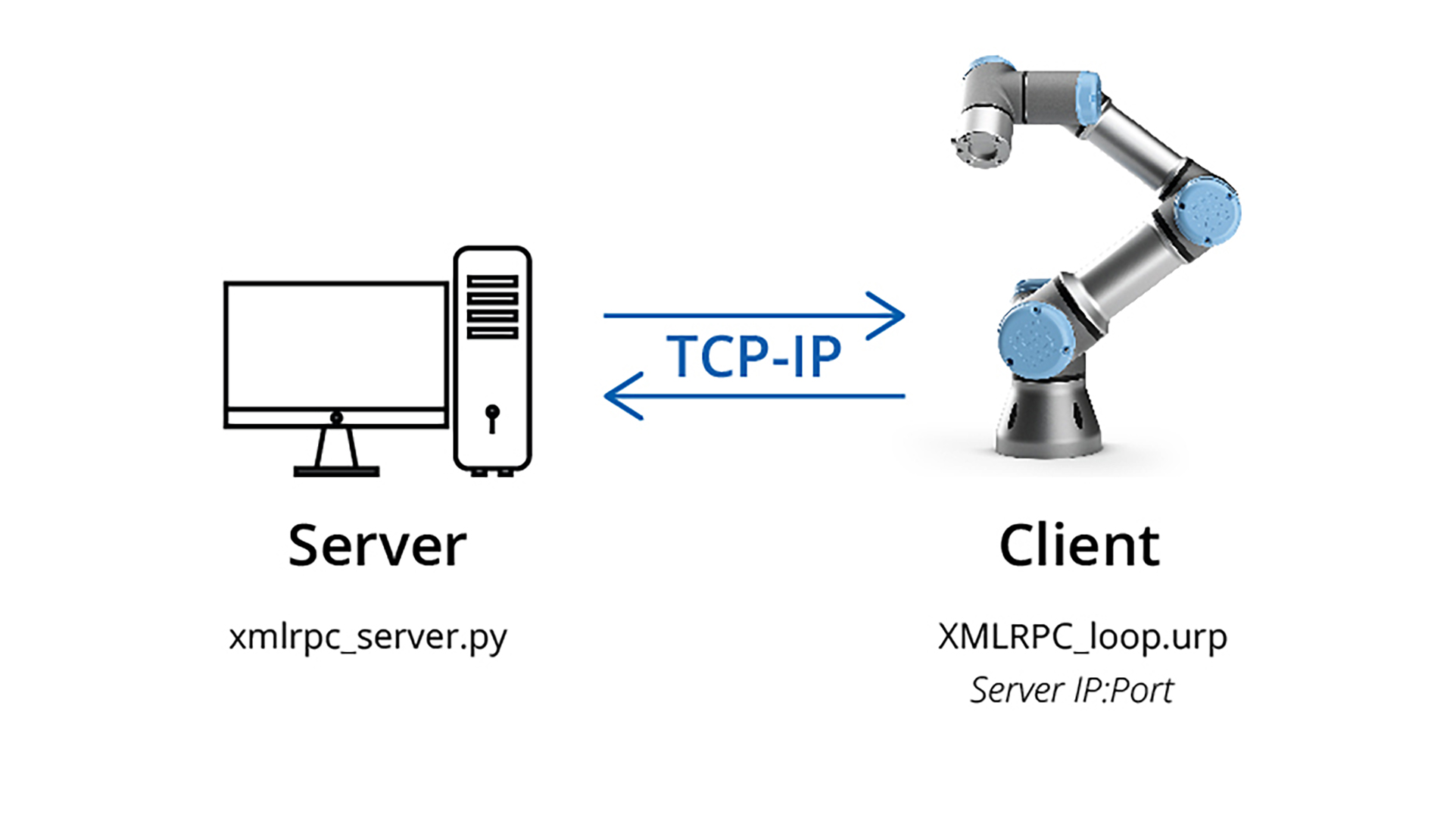
This is my demo code on how to use the XML-RPC to communicate with Universal Robots (UR). UR is the client and PC is the server that runs the Python script. On the demo code, the script only changes the x coordinate.
Enable remote control on the robot side.
You must change the server IP address and port in the UR code. Execute the server first then UR.
Pose format: Pose = [x, y, z, rx, ry, rz]
XML-RPC is a remote procedure call (RPC) protocol which uses XML to encode its calls and HTTP as a transport mechanism.
My example code on my GitHub: github.com/taunoe/UR-scripts
